| Computer Vision and Multimedia Lab |
| Computer Vision and Multimedia Lab |
|
|||||||||||||||||
|
|
We present an improved algorithm for two-image camera self-calibration and Euclidean structure recovery, where the effective focal lengths of both cameras are assumed to be the only unknown intrinsic parameters. By using the absolute quadric, it is shown that the effective focal lengths can be computed linearly from two perspective images without imposing scene or motion constraints. Moreover, a quadratic equation derived from the absolute quadric is proposed for solving the parameters of the plane at infinity from two images, which upgrades a projective reconstruction to a Euclidean reconstruction. |
|
|
|
||
|
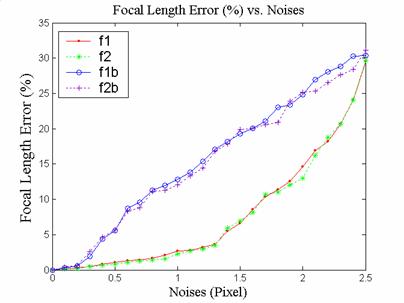
Figure 1. Average error ratio of the estimated effective focal lengths vs. noise. The focal lengths f 1 and f 2 are obtained by using our method and f 1b and f 2b are obtained by using Bougnoux's method [6] . |
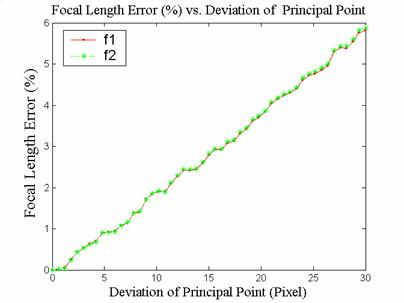
Figure 2. Average error ratio of the estimated effective focal lengths ( f 1 and f 2 ) versus deviation of the principal point. |
||
|
|
|
||
|
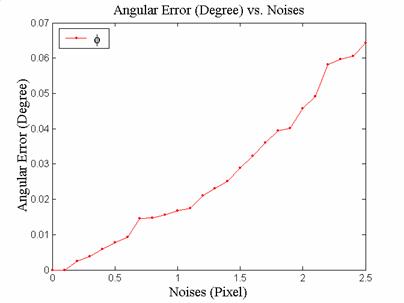
Figure 3. Angular error of the estimated parameters of the plane at infinity (Φ) vs. noise. |
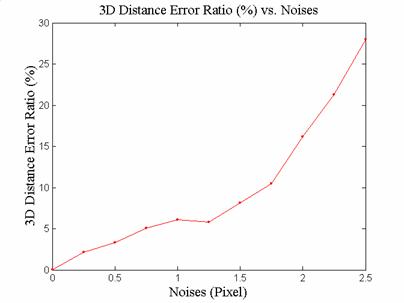
Figure 4. Average 3D distance error ratio of the scene points vs. noise. |
|
|
|
|
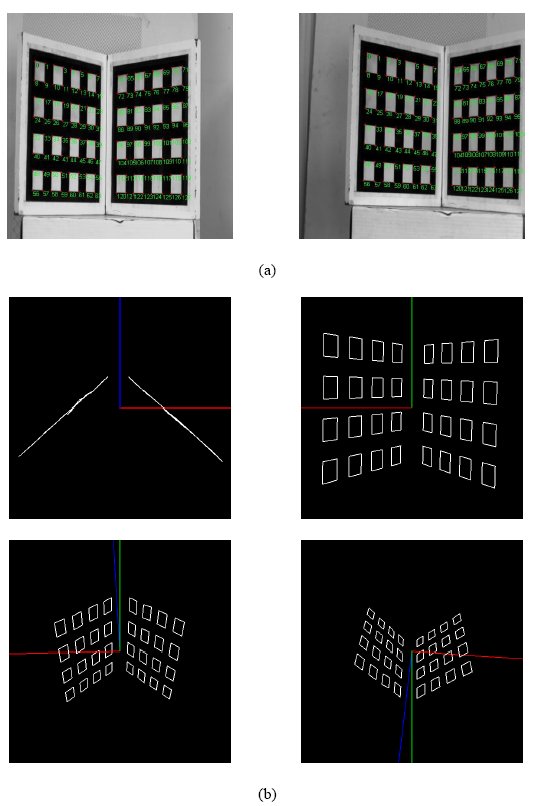
Figure 5. (a) Images of calibration grids. (b) Perspective images of reconstructed grids. |
|
|
|
|
|
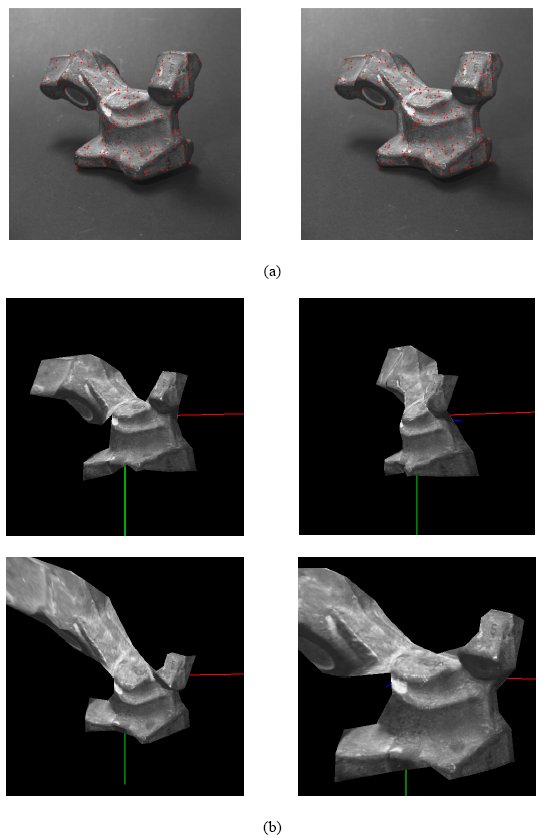
Figure 6. (a) Images of Renault part. (b) Perspective images of reconstructed part. |
|
[1] Chun-Rong Huang, Chu-Song Chen, and Pau-Choo Chung, “An Improved Algorithm for Two-image Camera Self-Calibration and Euclidean Structure Recovery Using Absolute Quadric,” Pattern Recognition , vol. 37, no. 8, pp. 1713-1722, 2004. [2] Chun-Rong Huang, Chu-Song Chen, and Pau-Choo Chung, “A linear solution for camera self-calibration from multi-planar scenes,” Proceedings of Conference on Computer Vision, Graphics, and Image Processing , Taiwan, Aug., 2003. |